研究プロジェクト概要
本プロジェクトは、豪雨や地震などにより発生した土砂崩落によって道路や河川が寸断された際に、土砂を除去して作業車両が通行可能となる仮設道路を構築する、自律型の災害対応ロボットの開発を目的とする。仮設道路の構築には、堆積した土砂を除去するためにバックホウと呼ばれる建設機械が用いられる。緩んだ地盤での作業は、土砂のさらなる崩落やバックホウの転倒といった危険を伴うため、通常は熟練の操縦者によって作業が行われている。
本プロジェクトにおける課題は、熟練作業者がバックホウを用いて実施している一連の作業を自動化することである。たとえば、移動しやすくするために地面を切り土や盛り土によって平坦に整えたり、移動の妨げとなる障害物を別の場所に移動させたり、路肩の崩落を防ぐために土砂をならして法面を形成したりする。また、自身の転倒を防ぐための判断も含まれ、これら多様な作業は、すべて作業者の経験に基づいて実施されている。本プロジェクトでは、これらのうち、障害物の除去や地面の整地、路肩における法面の形成といった作業の自動化に取り組む。
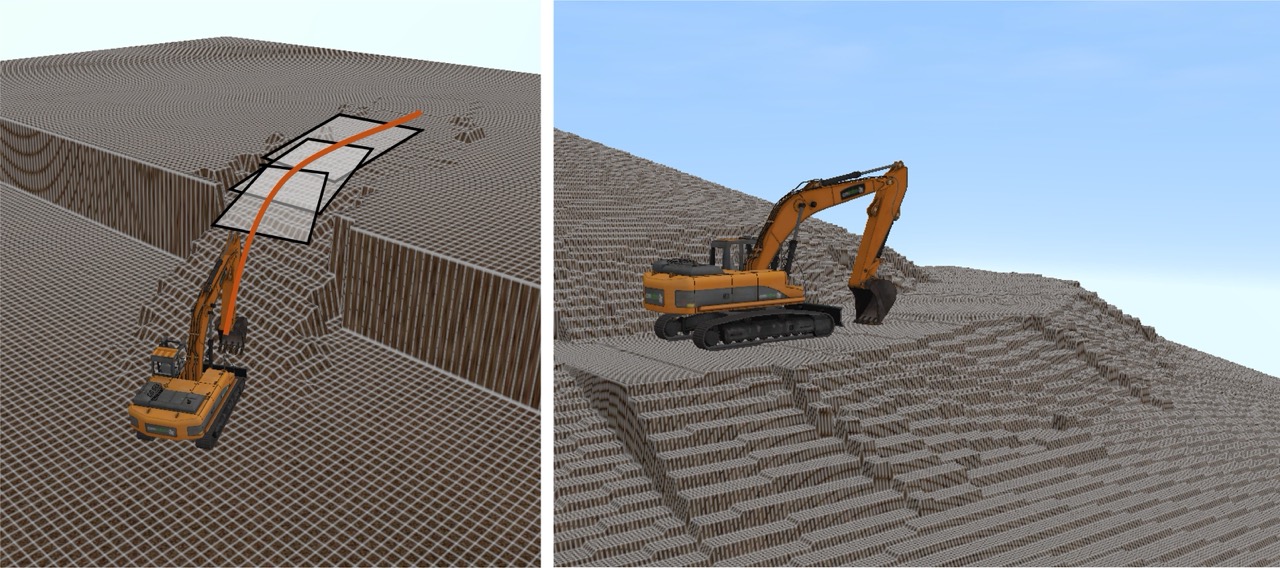
本プロジェクトは、バックホウが作業および移動を円滑に行えるよう、地形を自動で改変する方法を提案する。提案手法の特徴は、地形の切り土および盛り土に要するコストを考慮した新たなコスト関数を定義し、改変後の地形およびそのために必要な動作を逐次的に計画する点にある[1][2]。目標とする地形に近づけるよう、切り土と盛り土の位置と量を調整し、移動しやすい路面を構築するための動作生成手法を開発した[3][4]。
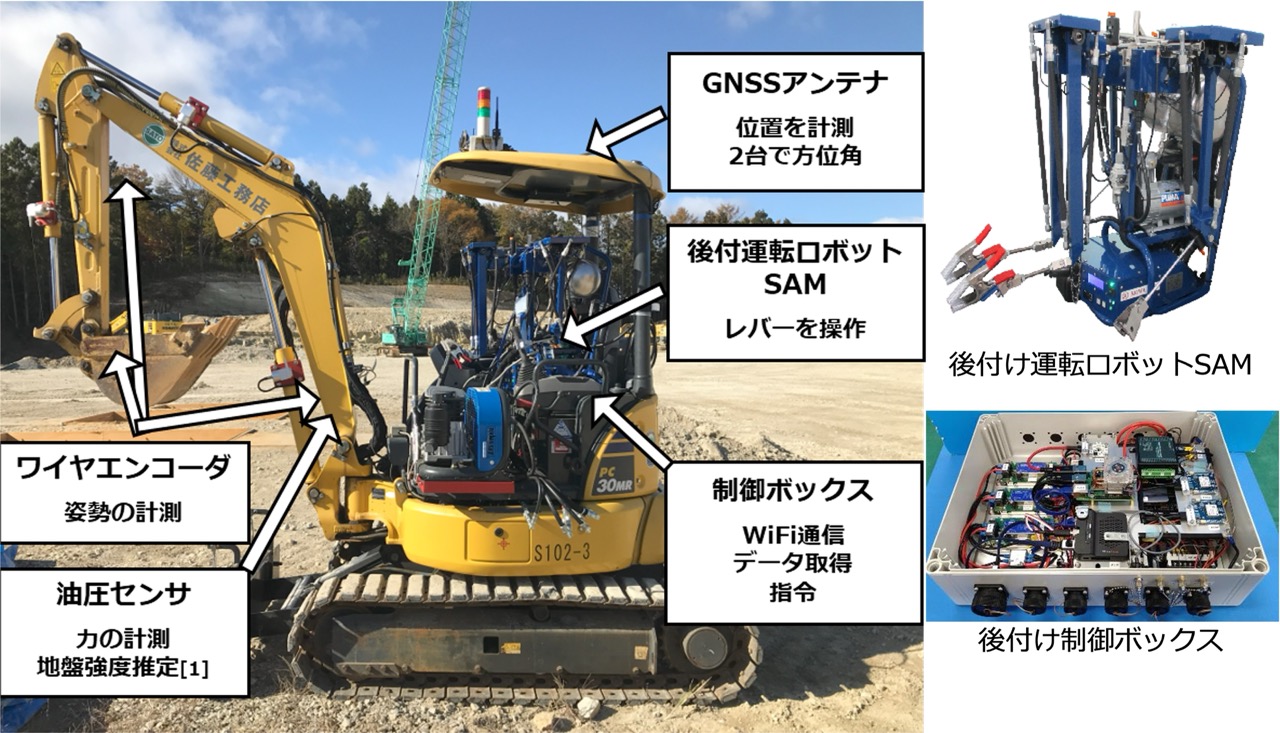
提案手法の有効性は、土の変形を再現可能な仮想空間を用いたシミュレーションにより検証した[1][2][3][4]。今後は、後付け型の運転ロボットおよび制御ボックスを3tクラスのバックホウに搭載し、実機による動作検証を行う予定である[5]。
関連リンク
- Moonshot 目標3:
多様な環境に適応しインフラ構築を革新する協働AIロボット(永谷圭司PM)
https://www.jst.go.jp/moonshot/program/goal3/32_nagatani.html
発表論文
- “走行困難な地形を改変して移動するバックホウの経路計画,”
鈴木裕太, 黒崎吉隆, 大野和則, 小島匠太郎, Ranulfo Bezerra, 田所諭,
ROBOMECH 2024
DOI: http://dx.doi.org/10.1299/jsmermd.2024.1A1-H09 - “困難地形を改変するバックホウの法面を有する経路と地形計画,”
鈴木裕太,黒崎吉隆,大野和則,小島匠太郎,Bezerra Ranulfo,里見知昭,高橋弘,田所 諭
第42回日本ロボット学会学術講演会, 1L4-02, 2024 - “凹凸の少なく走行しやすい斜面に改変するバックホウの動作生成,”
黒崎吉隆,鈴木裕太,大野和則,小島 匠太郎,Bezerra Ranulfo,里見 知昭,高橋 弘,田所 諭
第42回日本ロボット学会学術講演会, 1L4-03, 2024. - “踏破困難な地形を凹凸の少ない走行しやすい斜面に改変するバックホウの動作生成,”
黒崎吉隆, 鈴木裕太, 小島匠太郎, Ranulfo Bezerra, 里見知昭, 高橋弘, 田所諭, 大野和則
第30回ロボティクスシンポジア, pp. 285-288, 2025. - “建設機械の遠隔/自動化を加速するレトロフィット技術,”
大野 和則
日本ロボット学会誌, 43 巻, 6 号, p. 574-577, 2025.
DOI: https://doi.org/10.7210/jrsj.43.574