-
地形改変により移動の革新
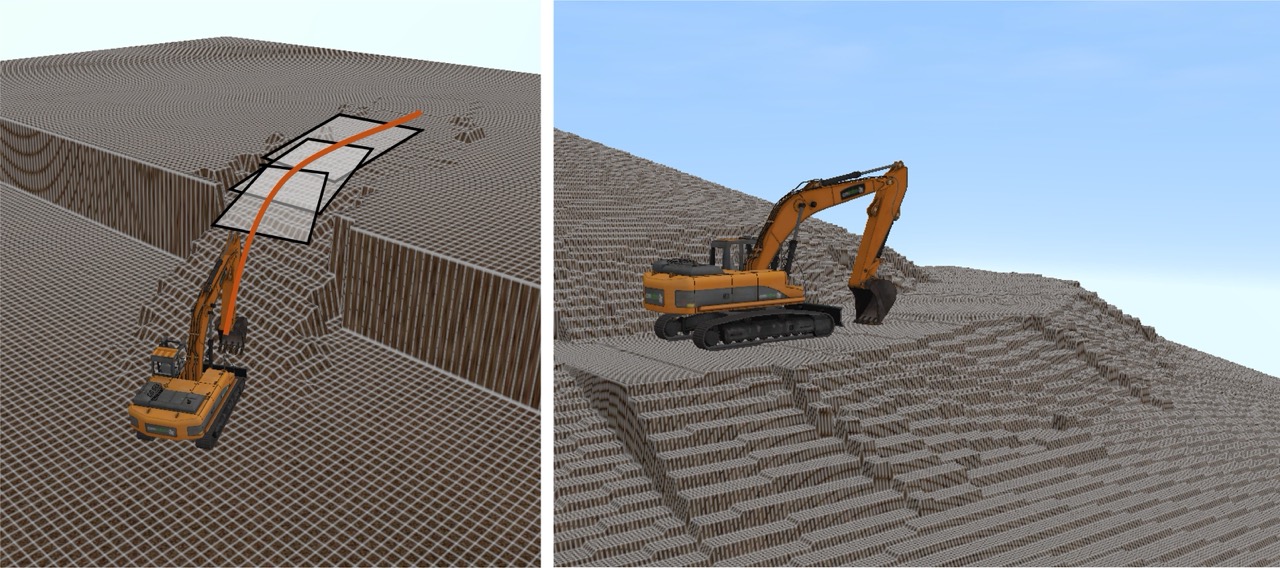
研究プロジェクト概要 本プロジェクトは、豪雨や地震などにより発生した土砂崩落によって道路や河川が寸断された際に、土砂を除去して作業車両が通行可能となる仮設道路を構築する、自律型の災害対応ロボットの開発を目的とする。仮設道路の構築には、堆積した土砂を除去するためにバックホウと呼ばれる建設機械が用いられる。緩んだ地盤での作業は、土砂のさらなる崩落やバックホウの転倒といった危険を伴うため、通常は熟練の操縦者によって作業が行われている。 本プロジェクトにおける課題は、熟練作業者がバックホウを用いて実施している一連の作業を自動化することである。たとえば、移動しやすくするために地面を切り土や盛り土によって平坦に整えたり、移動の妨げとなる障害物を別の場所に移動させたり、路肩の崩落を防ぐために土砂をならして法面を形成したりする。また、自身の転倒を防ぐための判断も含まれ、これら多様な作業は、すべて作業者の経験に基づいて実施されている。本プロジェクトでは、これらのうち、障害物の除去や地面の整地、路肩における法面の形成といった作業の自動化に取り組む。 本プロジェクトは、バックホウが作業および移動を円滑に行えるよう、地形を自動で改変する方法を提案する。提案手法の特徴は、地形の切り土および盛り土に要するコストを考慮した新たなコスト関数を定義し、改変後の地形およびそのために必要な動作を逐次的に計画する点にある[1][2]。目標とする地形に近づけるよう、切り土と盛り土の位置と量を調整し、移動しやすい路面を構築するための動作生成手法を開発した[3][4]。 提案手法の有効性は、土の変形を再現可能な仮想空間を用いたシミュレーションにより検証した[1][2][3][4]。今後は、後付け型の運転ロボットおよび制御ボックスを3tクラスのバックホウに搭載し、実機による動作検証を行う予定である[5]。 関連リンク 発表論文
-

ロボット競技会での実践と実績
研究プロジェクト概要 当研究室では、開発したロボット技術を現実的な環境で評価・洗練するため、国内外のロボット競技会に積極的に参加しています。特に、災害対応や探索タスクを対象とした実践的な競技を通じて、研究成果の有効性を確認するとともに、繰り返しの試験によるロボットの完成度向上を図っています。 国際大会での主な実績としては、WRS(World Robot Summit)2020「プラント災害予防チャレンジ」での世界優勝、RoboCup Rescue 2023(災害対応ロボットの国際競技会)での第3位入賞などが挙げられます。 これらの競技会では、災害現場やプラント点検の現場を模した困難なフィールドにおいて、ロボットの探索能力・作業能力・不整地での移動性能などが評価されます。 当研究室のロボットは、こうした試練を通じて国際的にも高い評価を受けてきました。 また、競技会で培った技術と経験は、実際の現場での運用にも活かされています。たとえば、軍艦島における調査ミッションで使用されたクローラロボット「Onix」は、RoboCupやWRSを通じてブラッシュアップされてきた機体であり、ミッションの成功に大きく寄与しました。 このように私たちは、「競技会=研究成果の試験と実証の場」と位置づけて取り組んでおり、学生の皆さんにとっても挑戦と成長を実感できる貴重な機会となっています。 関連リンク 発表論文
-

クローラロボット
研究プロジェクト概要 当研究室では、災害対応やインフラ点検に適したクローラ型ロボットの研究開発を継続的に進めています。その始まりは、大野研究室発足以前、田所研究室において開発されたロボットQuinceにさかのぼり、同機は福島第一原発における探査・情報収集ミッションに投入されるなど、大きな役割を果たしました。その後も改良と応用が重ねられ、現在は最新機であるOnixへと発展しています。 Onixは、階段昇降や大型バルブの操作、狭隘空間での安定した走行といった高い移動・作業性能を備えており、WRS2020での世界優勝やRoboCup Rescue 2023での第3位入賞といった国際大会での成果に加え、軍艦島調査ミッションといった実際の現場でも活用されています。 研究の中では、プラント内などの狭隘路で周囲の壁に接触した際に発生する「壁デッドロック」を回避しながら走行する技術や、壁からの反力を活用して螺旋階段を登る方法、さらには本来クローラでは困難な横方向への移動を壁反力によって可能にする方法など、限られた空間における外力の積極的な活用を通じた移動制御の高度化に取り組んできました。 こうした成果の一部は、三菱重工との共同研究を通じて商用のプラント点検ロボットであるEXroverにも応用されており、研究成果の社会実装も進んでいます。今後も、実環境での実用性を意識したロボット開発を推進していきます。 関連リンク 発表論文
-

自動消防ロボットシステム
研究プロジェクト概要 本プロジェクトは、石油化学コンビナート火災に対応する消防ロボットシステムを三菱重工業などの企業と共同で研究している。直径80mを超える大型の石油タンク火災の火炎近傍では、15〜20 kW/m²の高い放射熱が発生する。消防隊員の耐放射熱服の4 kW/m²を大きく超えるため、人間に変わって自動で消火活動を行うロボットシステムの開発が必要である。 課題は、20 kW/m²の高い放射熱を発する火炎近傍での消火活動を無人で行う消防ロボットシステムの開発である。私達は、最大300m離れた火炎近傍の高い放射熱の環境で自動で消火活動を行う放水ロボットとホース延長ロボットを提案する。提案手法の特徴は、放水砲ロボットとホース延長ロボットの2台が連携して自動でホースの運搬と敷設を行うことである。 新技術として、軽量で長時間の活動を可能にする耐放射熱外装[5]、2台のロボットの自動追従制御[7]、発災後に航空写真と整合性の取れたロボット用地図をリアルタイムに構築するGP & LiDAR based SLAM [2][3]、複雑な環境で衝突せずに走行するための経路経路計画 [1]、1MPaを超える水圧をかけるホースを屈曲せずに敷設する経路生成[4]などの新技術を開発した。 開発した消防ロボットシステムは、2019年に千葉県市原市消防に配備され、消防隊員による運用が始まっている。無人化を実現する消防ロボットシステムはCOVID-19などのパンデミックでも有効に機能することを提案した[6]。2022年にはスクラムフォースのおもちゃが販売された。 関連リンク [a]…
-

建設機械のレトロフィット自動化プロジェクト
研究プロジェクト概要 本プロジェクトは、市場に多数存在する建設機械に対して、後付けで自動運転を可能にするレトロフィット技術の研究を行っている。労働力不足や土木建設作業の効率化が求められる現場において、自動化へのニーズは極めて高い。しかし、国内の建設現場の90%以上を担う中小事業者が利用可能な自動化対応の建機は、現在ほとんど存在していない。私達は、中小事業者やレンタル業者が保有する既存の建機に対し、レトロフィットによって自動化機能を付加することで、この課題の解決を目指している。 本プロジェクトでは、積載量30トンを超える大型ダンプトラックによる土砂や砕石の運搬を自動化するレトロフィット技術を提案する。提案手法の特徴は、運転席に後付けで搭載した運転ロボットにより、積込み、運搬、積み下ろしに必要なダンプの操作をすべて自動で行う点にある。 私達は、新たに次のような新しい技術を開発した。 これらの技術を統合し、大型ダンプトラックによる自動運搬の実証実験を進めている。 本研究は、NEDO [b] およびGo-Techの支援を受け、アーティキュレート型六輪ダンプトラックによる土木建設現場での土砂運搬や、リジッドフレーム型重ダンプトラックによる砕石運搬の自動化を実現した。また、NEDO特別講座の支援のもと、rettofit-ai のウェブサイトやオンライン講座を通じて、レトロフィット技術の教育および社会実装・普及にも取り組んでいる[a]。 関連リンク [a] Retrofit-ai.com [b] NEDO PJ movie…
-

マルチモーダル基盤モデルによる暗渠・坑道巡視ロボットのナビゲーション
研究プロジェクト概要 定期的な実施が義務付けられている暗渠や坑道、トンネルの巡視点検を代替する移動ロボットを研究しています。このような一様な屋内環境では、GPSやSLAMによる位置推定に基づく従来の自動巡行アルゴリズムは適用できません。また、未知の変状やトラブルも発生しうるため、柔軟な状況判断と行動計画が求められます。そこで本研究では、点検の背景情報やロボットに搭載したセンサの出力をマルチモーダル基盤モデル(AI)に与え、環境と自己の状況を俯瞰的に考慮した行動を生成することで、熟練点検員のような「よしなに」点検を行うロボットを目指しています。 関連リンク 発表論文
-
異種マーカを重畳した二次元コードHueCodeとロボットへの応用
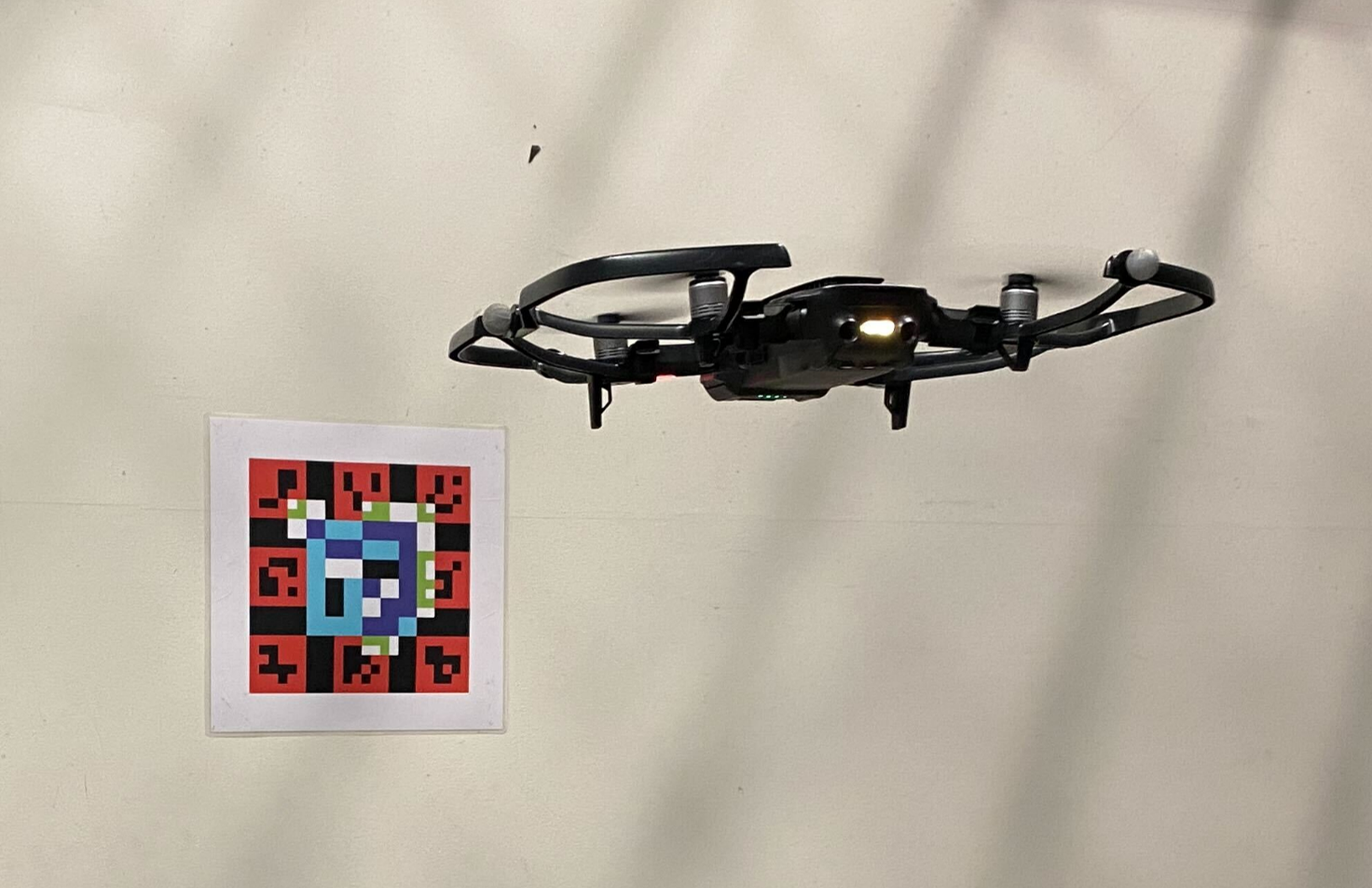
研究プロジェクト概要 文字列を格納するためのQRコードや位置情報取得のためのARマーカなど、異なる種類のマーカを1枚に重ね合わせた汎用二次元マーカHueCodeを提案しています(特許取得済み)。事前準備なしに貼るだけで『何が(文字列)』と『どこで(位置)』をまとめて読み出し可能になるため、様々なロボットアプリケーションに利用可能です。特殊な配色によって、既存の読み出しソフトからは第一のマーカに見えるため、従来のユースケースを変更することなく新たな機能をマーカに追加できます。夕焼けの相当の赤い光から曇り相当の青い光まで、様々な照明下で読み出し可能なことを実験により確認しました。 関連リンク 発表論文
-

サイバー救助犬
研究プロジェクト概要 本プロジェクトは、先進的なロボット技術を活用し、災害救助犬の捜索能力を支援・拡張することを目的としている。救助犬は、瓦礫の上を俊敏に移動し、優れた嗅覚を用いて被災者を発見し、その位置を吠えることでハンドラーに知らせる能力を有する。災害発生後72時間以内に被災者を捜索する手段として、救助犬は高く評価されている。 被災者を救助するレスキュー隊員が救助の優先順位を判断するためには、被災者の位置情報に加えて、健康状態、人数、周囲環境の安全性などの詳細な情報が必要である。しかし、イヌはこれらの情報を言語や動作によってハンドラーやレスキュー隊員に伝達することができない。 本プロジェクトでは、これまでに災害対応ロボットの開発を通じて培ってきたセンシング技術を応用し、災害救助犬による捜索行動の記録および可視化手法を提案する[4]。具体的には、GNSSアンテナ、ビデオカメラ、マイク、慣性センサ(IMU)を搭載した軽量かつ非侵襲なサイバー救助犬スーツを開発した[5]。当該スーツには小型ボードPCが搭載されており、センサデータをリアルタイムに処理し、救助犬の行動を自動で認識する。また、携帯電話網を用いて、遠隔地にいるハンドラーや消防隊員が持つタブレット端末やスマートフォンに捜索活動の状況をリアルタイムで配信するシステムを構築した。また、ハンドラーや救助隊員が手袋を装着した状態でも操作可能なユーザーフレンドリーなGUIも開発した。 サイバー救助犬スーツの主な機能は、(1) 犬目線の映像および音声の配信[4][5]、(2) 航空写真や地図上への捜索軌跡および行動(歩行、走行、嗅覚探索、吠えなど)の表示[1][2][4]、(3) 蓄積映像からの遺留品の逆検索[3]である。 開発したサイバー救助犬スーツは、国内の二つの救助犬団体(JRDA[b]およびJRA [c])に配備され、地域の消防や自衛隊と連携した訓練において実証評価を実施した。サイバー救助犬の成果は広く注目されており、第16回総合科学技術・イノベーション会議では、安倍晋三首相に対して研究成果の紹介を行った[d]。また、テレビドラマ「科捜研の女」の「救助犬ゾイ」の話において、サイバー救助犬スーツが使用された[e]。さらに、大阪・関西万博の復興ポータルサイトにおいても、ImPACT TRC内のサイバー救助犬の成果が紹介されている[f]。 関連リンク [a] ImPACT Tough Robotics Challenge …
-
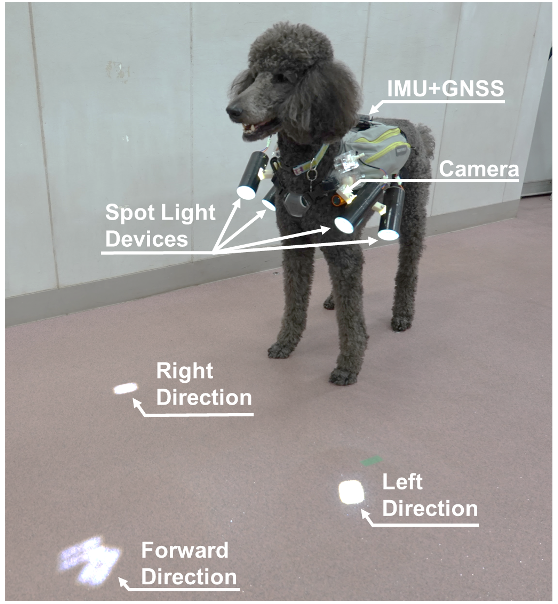
スーツ搭載光源を利用したイヌの行動誘導
研究プロジェクト概要 本プロジェクトは、救助犬を遠隔から任意の場所に誘導する技術の確立を目的としている。災害救助犬は、ハンドラーの声や手振りによる指示を手がかりに捜索を行う。しかし、重機が稼働するような騒音の激しい環境や、ハンドラーから大きく離れた現場においては、音声や手振りによる指示がイヌに届きにくくなる場合がある。たとえば、雪山において数キロメートルにわたって捜索を行う山岳救助犬では、ハンドラーの声が届かない状況も発生しうる。そのような騒音下や遠隔地においても、救助犬を所望の捜索位置に誘導するための技術の確立が求められている。 従来より、音声や振動を用いてイヌを誘導する研究や取り組みが幾つか行われてきた。これらの手法では、音や振動によって「前進」「停止」「右回り」など、あらかじめ設定された動作をイヌに行わせることに成功している。しかし、依然として課題となっているのは、イヌを任意の方向へと柔軟に誘導する方法の開発である。 本研究ではこの課題を解決する手段として、救助犬が装着するスーツに搭載した光源を利用し、移動方向を視覚的に誘導する新たな手法を提案する[1][2]。提案手法では、イヌの前方の地面に対して、前・右・左の複数方向へスポット光を照射可能な光源をスーツに搭載し、ハンドラーがリモコン操作によって照射方向を切り替える。イヌは照射された光を追いかけることで、任意の方向に誘導される。さらに、地面に照射されたスポット光がイヌの動きと同期して移動することで、イヌは継続的にその光を追尾することができる。 動く明るい光を追う行動は、イヌに限らず、ネコ、鳥、魚、人間など、多くの動物に共通して見られる習性であり、本手法は多様な生物種に適用可能な誘導技術としての可能性も秘めている。 本手法に基づき、スポット光を追う訓練を受けた複数のイヌを用いて行動誘導の実証実験を実施し、イヌを任意の地点に誘導できることを確認した[1][2]。光刺激を利用した人間のナビゲーションなどの応用にも取り組んだ[3]。 関連リンク 発表論文
-

イヌの首輪型給餌器
研究プロジェクト概要 本プロジェクトは、犬の訓練やしつけにおいて、離れた場所から随時ご褒美として餌を与えることが可能な給餌装置の開発を目的としている。具体的には、球形の固形フードを遠隔操作によって与える方式を構築するものである。 従来の方法としては、環境に設置された据え置き型の給餌器や、ハンドラーが手から直接餌を与える手法が用いられてきた。しかし、これらの方法では、報酬を与えられる範囲が給餌器やハンドラーの近傍に限定されるという空間的制約が存在していた。 この課題を解決するために、本プロジェクトでは、犬の首輪に取り付け可能なリモート操作式給餌装置を提案する。本装置により、犬がハンドラーから離れた場所にいても、即座に報酬として餌を与えることが可能となる。開発した首輪型給餌器は、犬にとって負担の少ない小型かつ適切な形状を有しており、球状の本体内部には最大20個程度の固形フードを収納可能である。スマートフォンのアプリから送信されるコマンドに応じて、1回につき1粒ずつ餌を遠隔地から自動的に給餌することができる。複数のイヌを用いて給餌の評価を行い、実際にイヌへの給餌が可能であること、ならびにイヌによっては首元に装着された給餌器を気にする個体が存在することを確認した。あわせて、背中に搭載するタイプの給餌器も開発し、異なるイヌに対して連続的な給餌が可能であることを確認した[2]。 関連リンク 発表論文