研究プロジェクト概要
本プロジェクトは、市場に多数存在する建設機械に対して、後付けで自動運転を可能にするレトロフィット技術の研究を行っている。労働力不足や土木建設作業の効率化が求められる現場において、自動化へのニーズは極めて高い。しかし、国内の建設現場の90%以上を担う中小事業者が利用可能な自動化対応の建機は、現在ほとんど存在していない。私達は、中小事業者やレンタル業者が保有する既存の建機に対し、レトロフィットによって自動化機能を付加することで、この課題の解決を目指している。
本プロジェクトでは、積載量30トンを超える大型ダンプトラックによる土砂や砕石の運搬を自動化するレトロフィット技術を提案する。提案手法の特徴は、運転席に後付けで搭載した運転ロボットにより、積込み、運搬、積み下ろしに必要なダンプの操作をすべて自動で行う点にある。
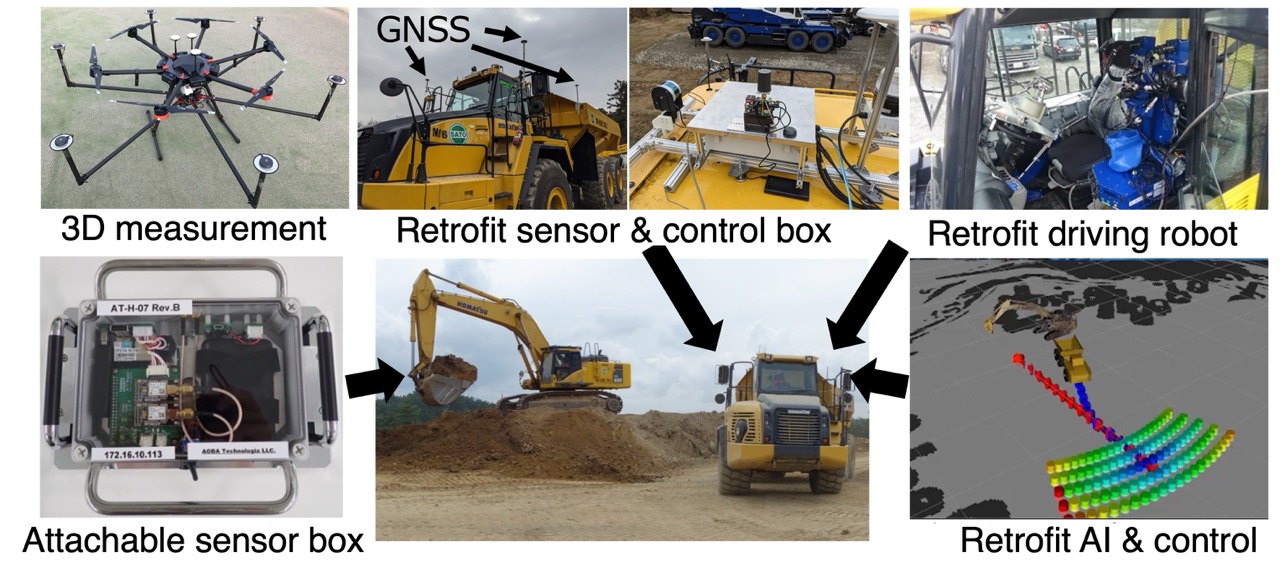
私達は、新たに次のような新しい技術を開発した。
- 空気アクチュエータを用いた後付け運転ロボット[4][8]
- 磁石を利用した後付けセンサボックス [2]
- 複数のGNSSおよびLiDARを搭載したドローンによる三次元地形のリアルタイムSLAM
- 複数GNSSを用いた大型ダンプトラックの位置・姿勢・速度・ステアリング角・荷台角度の高精度推定 [6][11]
- 人間と同様に切り返し動作を含む柔軟な経路生成 [1][9][10 ]
- BP-HMMを利用した人間が操るバックホウの積込み時期の予測 [3][7]
- 異なる日の3D地図から現場の意味情報の抽出 [5]
- 複数台のダンプが協調して譲り合う行動生成技術である。
これらの技術を統合し、大型ダンプトラックによる自動運搬の実証実験を進めている。
本研究は、NEDO [b] およびGo-Techの支援を受け、アーティキュレート型六輪ダンプトラックによる土木建設現場での土砂運搬や、リジッドフレーム型重ダンプトラックによる砕石運搬の自動化を実現した。また、NEDO特別講座の支援のもと、rettofit-ai のウェブサイトやオンライン講座を通じて、レトロフィット技術の教育および社会実装・普及にも取り組んでいる[a]。

関連リンク
[a] Retrofit-ai.com
[b] NEDO PJ movie
発表論文
- “Enhanced path smoothing based on conjugate gradient descent for firefighting robots in petrochemical complexes”
Naoki MIZUNO, Kazunori OHNO, Ryunosuke HAMADA, Hiroyoshi KOJIMA, Jun FUJITA, Hisanori AMANO, Thomas WESTFECHTEL, Takahiro SUZUKI, Satoshi TADOKORO
Advanced Robotics, 33, 14, (2019), 687-698.
DOI: https://doi.org/10.1080/01691864.2019.1632221 - “Attachable Sensor Boxes to Visualize Backhoe Motion”
Kento Yamada, Kazunori Ohno, Naoto Miyamoto, Taro Suzuki, Shotaro Kojima, Ranulfo Bezerra, Takahiro Suzuki, Keiji Nagatani, Yukinori Shibata, Kimitaka Asano, Tomohiro Komatsu, Satoshi Tadokoro
Proc. of IEEE/SICE International Symposium on System Integrations, (2020), 706-711,
DOI: https://doi.org/10.1109/SII46433.2020.9026227 - “Prediction of Backhoe Loading Motion via the Beta-Process Hidden Markov Model”
Kento Yamada, Kazunori Ohno, Ryunosuke Hamada, Thomas Westfechtel, Ranulfo Plutarco Bezerra Neto, Naoto Miyamoto, Taro Suzuki, Takahiro Suzuki, Keiji Nagatani, Yukinori Shibata, Kimitaka Asano, Tomohiro Komatsu, Satoshi Tadokoro
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), (2020), 2663-2670.
DOI: https://10.1109/IROS45743.2020.9340697 - “Autonomous Driving of Six-Wheeled Dump Truck with a Retrofitted Robot”
Tomohiro KOMATSU, Yota KONNO, Seiga KIRIBAYASHI, Keiji NAGATANI, Takahiro SUZUKI, Kazunori OHNO, Taro SUZUKI, Naoto MIYAMOTO, Yukinori SHIBATA, Kimitaka ASANO
I n: Ishigami, G., Yoshida, K. (eds) Field and Service Robotics. Springer Proceedings in Advanced Robotics, vol 16. (2021) Springer, Singapore.
DOI: https://doi.org/10.1007/978-981-15-9460-1_5 - “Semantic Mapping of Construction Site from Multiple Daily Airborne LiDAR Data”
Thomas WESTFECHTEL, Kazunori OHNO, Tetsu AKEGAWA, Kento YAMADA, Ranulfo Plutarco Bezerra NETO, Shotaro KOJIMA, Taro SUZUKI, Tomohiro KOMATSU, Yukinori SHIBATA, Kimitaka ASANO, Keji NAGATANI, Naoto MIYAMOTO, Takahiro SUZUKI, Tatsuya HARADA, Satoshi TADOKORO
IEEE Robotics and Automation Letters, 6, 2, (2021), 3073-3080.
DOI: https://doi.org/10.1109/LRA.2021.3062606 - “Estimation of articulated angle in six-wheeled dump trucks using multiple GNSS receivers for autonomous driving”
Taro SUZUKI, Kazunori OHNO, Shotaro KOJIMA, Naoto MIYAMOTO, Takahiro SUZUKI, Tomohiro KOMATSU, Yukinori SHIBATA, Kimitaka ASANO, Keiji NAGATANI
Advanced Robotics, Advanced Robotics, 35, 23, (2021), 1376-1387
DOI: https://doi.org/10.1080/01691864.2021.1974942.
Advanced Robotics Excellent Paper Award - “An Individual Prediction Model of the Pre-loading Motion for Operator and Backhoe Pairs”
Kento YAMADA, Kazunori OHNO, Ryunosuke HAMADA, Ranulfo Plutarco Bezerra NETO, Naoto MIYAMOTO, Shotaro KOJIMA, Taro SUZUKI, Takahiro SUZUKI, Keiji NAGATANI, Yukinori SHIBATA, Kimitaka ASANO, Tomohiro KOMATSU, Satoshi TADOKORO
Advanced Robotics, 35, 23, (2021), 1388-1403
DOI: https://doi.org/10.1080/01691864.2021.1980101 - “既存 6 輪ダンプトラックの自律走行のためのレトロフィット型ハンドル駆動用エアモータの速度制御”
小松 智広, 永谷 圭司, 平田 泰久, 鈴木 高宏, 大野 和則
計測自動制御学会論文集, 57, 10, (2021), 433-444,
DOI: https://doi.org/10.9746/sicetr.57.433
公益財団法人油空圧機器技術振興財団 学術論文顕彰 - “Loading an Autonomous Large-Scale Dump Truck: Path Planning Based on Motion Data from Human-Operated Construction Vehicles“
T. Akegawa, K. Ohno, S. Kojima, N. Miyamoto, T. Suzuki, T. Komatsu, T. Suzuki, Y. Shibata, K. Asano, S. Tadokoro
Proc. of 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), (2022), 6577-6584
DOI: https://doi.org/10.1109/IROS47612.2022.9981828 - “Path Planning of the Turning Back of an Autonomous Large-Scale Six-Wheeled Dump Truck for Loading/Leaving Sediment Based on Backhoe Work”
T. Akegawa, K. Ohno, S. Kojima, K. Yamada, W. Go, T. Suzuki, S. Kiribayashi, T. Komatsu, N. Miyamoto, T. Suzuki, Y. Shibata, K. Asano, K. Nagatani, S. Tadokoro
2022 IEEE/SICE International Symposium on System Integration, (2022), 511-518
DOI: https://doi.org/10.1109/SII52469.2022.9708879
SICE International Young Authors Award-SII2022 - “Automatic Operation of an Articulated Dump Truck: State Estimation by Combined QZSS CLAS and Moving-Base RTK Using Multiple GNSS Receivers”
Taro Suzuki, Shotaro Kojima, Kazunori Ohno, Naoto Miyamoto, Takahiro Suzuki, Kimitaka Asano, Tomohiro Komatsu, Hiroto Kakizaki
Proc. of the ION 2024 Pacific PNT Meeting, (2024) 65-74.