研究プロジェクト概要
本プロジェクトは、先進的なロボット技術を活用し、災害救助犬の捜索能力を支援・拡張することを目的としている。救助犬は、瓦礫の上を俊敏に移動し、優れた嗅覚を用いて被災者を発見し、その位置を吠えることでハンドラーに知らせる能力を有する。災害発生後72時間以内に被災者を捜索する手段として、救助犬は高く評価されている。
被災者を救助するレスキュー隊員が救助の優先順位を判断するためには、被災者の位置情報に加えて、健康状態、人数、周囲環境の安全性などの詳細な情報が必要である。しかし、イヌはこれらの情報を言語や動作によってハンドラーやレスキュー隊員に伝達することができない。
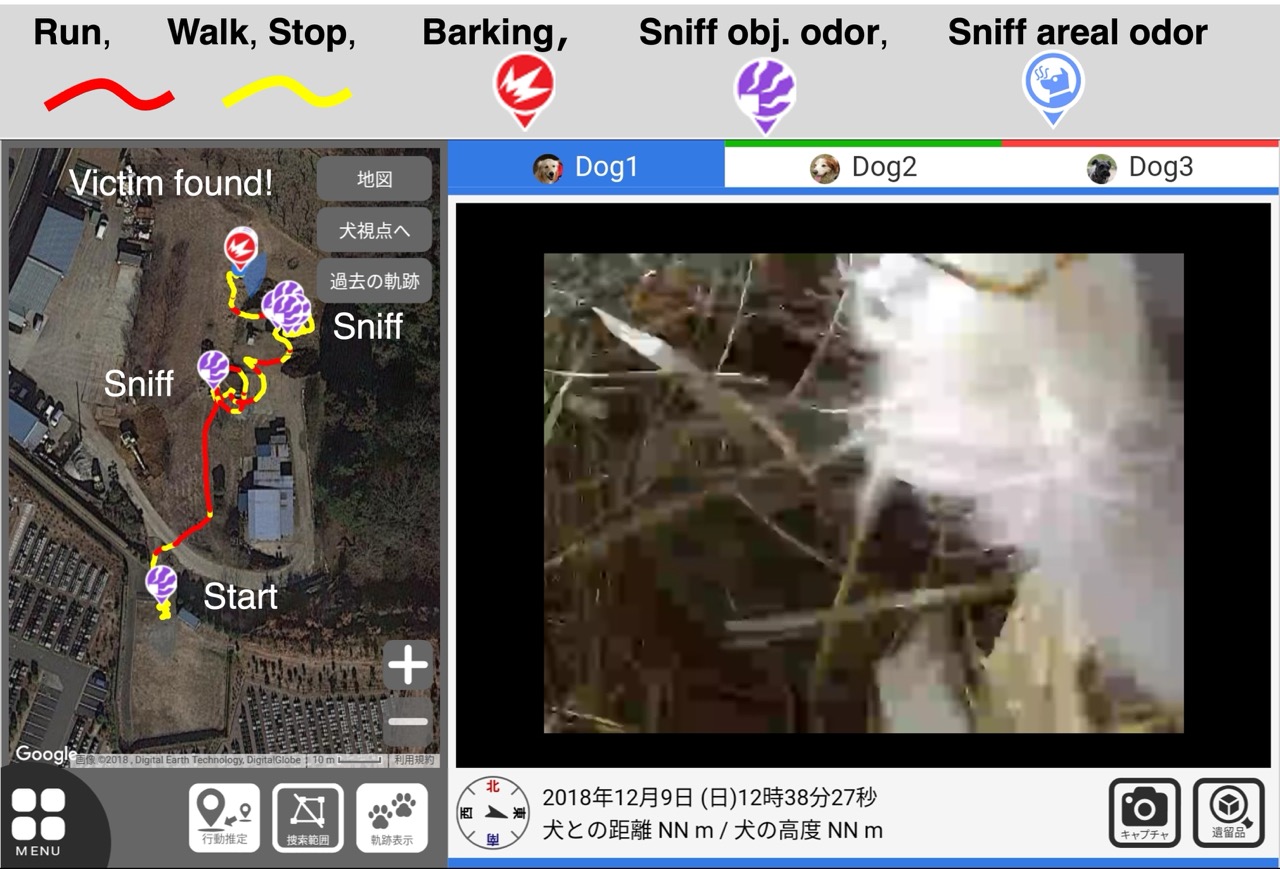
本プロジェクトでは、これまでに災害対応ロボットの開発を通じて培ってきたセンシング技術を応用し、災害救助犬による捜索行動の記録および可視化手法を提案する[4]。具体的には、GNSSアンテナ、ビデオカメラ、マイク、慣性センサ(IMU)を搭載した軽量かつ非侵襲なサイバー救助犬スーツを開発した[5]。当該スーツには小型ボードPCが搭載されており、センサデータをリアルタイムに処理し、救助犬の行動を自動で認識する。また、携帯電話網を用いて、遠隔地にいるハンドラーや消防隊員が持つタブレット端末やスマートフォンに捜索活動の状況をリアルタイムで配信するシステムを構築した。また、ハンドラーや救助隊員が手袋を装着した状態でも操作可能なユーザーフレンドリーなGUIも開発した。
サイバー救助犬スーツの主な機能は、(1) 犬目線の映像および音声の配信[4][5]、(2) 航空写真や地図上への捜索軌跡および行動(歩行、走行、嗅覚探索、吠えなど)の表示[1][2][4]、(3) 蓄積映像からの遺留品の逆検索[3]である。
開発したサイバー救助犬スーツは、国内の二つの救助犬団体(JRDA[b]およびJRA [c])に配備され、地域の消防や自衛隊と連携した訓練において実証評価を実施した。サイバー救助犬の成果は広く注目されており、第16回総合科学技術・イノベーション会議では、安倍晋三首相に対して研究成果の紹介を行った[d]。また、テレビドラマ「科捜研の女」の「救助犬ゾイ」の話において、サイバー救助犬スーツが使用された[e]。さらに、大阪・関西万博の復興ポータルサイトにおいても、ImPACT TRC内のサイバー救助犬の成果が紹介されている[f]。

関連リンク
[a] ImPACT Tough Robotics Challenge
https://www.jst.go.jp/impact/program/07.html (In Japanese)
https://www.jst.go.jp/impact/en/program/07.html (In English)
[b] Japan Rescue Dog Association (JRDA)
https://www.kinet.or.jp/kyujoken
[c] Japan Rescue Association (JRA)
https://www.japan-rescue.com/en/
[d] The 16th Science and Technology Policy Council (Shinzo Abe (Japan Prime Minister))
https://www8.cao.go.jp/cstp/gaiyo/honkaigi/i016index.html
[e] The Woman of the Forensic Science Research Institute Season 21 Episode 15 “Rescue Dog Zoi”
https://douga.tv-asahi.co.jp/program/24751-29454/32396
[f] Osaka-Kansai Expo 2025 Recovery Portal Site
https://expo2025-portal.reconstruction.go.jp/bbb/tech/07
発表論文
- “Precise Velocity Estimation for Dog using its Gait”
Naoki SAKAGUCHI, Kazunori OHNO, Eijiro TAKEUCHI and Satoshi TADOKORO
The 9th Conference on Field and Service Robotics, (2013). - “Detection of Continuous Barking Actions from Search and Rescue Dogs’ Activities Data”
Yuichi KOMORI, Kazuaki OHNO, Takuaki FUJIEDA, Takahiro SUZUKI, Satoshi TADOKORO
2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), (2015), 630-635.
DOI: https://doi.org/10.1109/IROS.2015.7353438 - “An image recognition system aimed at search activities using cyber search and rescue dogs”
Solvi ARNOLD, Ryunosuke HAMADA, Kazunori OHNO, Kimitoshi YAMAZAKI
Journal of Field Robotics, 36, 4, (2018), 677-695
DOI: https://doi.org/10.1002/rob.21848 - “Cyber-Enhanced Rescue Canine”
Kazunori Ohno, Ryunosuke Hamada, Tatsuya Hoshi, Hiroyuki Nishinoma, Shumpei Yamaguchi, Solvi Arnold, Kimitoshi Yamazaki, Takafumi Kikusui, Satoko Matsubara, Mihi Nagasawa, Takatomi Kubo, Eri Nakahara, Yuki Maruno, Kazushi Ikeda, Toshitaka Yamakawa, Takeshi Tokuyama, Ayumi Shinohara, Ryo Yoshinaka, Diptarama Hendrian, Kaizaburo Chubachi, Satoshi Kobayashi, Katsuhito Nakashima, Hiroaki Naganuma, Ryu Wakimoto, Shu Ishikawa, Tatsuki Miura and Satoshi Tadokoro In Ed. Satoshi Tadokoro, Disaster Robotics – Results from the ImPACT Tough Robotics Challenge
Springer Tracts in Advanced Robotics 128, (2019), pp. 143-193
DOI: https://doi.org/10.1007/978-3-030-05321-5_4 - “Development of a Lightweight Cyber-enhanced Rescue Canine Suit with Heat Protection and Anti-slip Countermeasures”
Hiroyuki NISHINOMA, Chayapol BEOKHAIMOOK, Kazunori OHNO, Ayumi SHINOHARA, Satoshi TADOKORO
Proc. of Safety, Security and Rescue Robotics (SSRR), (2019) pp. 74-80
DOI: https://doi.org/10.1109/SSRR.2019.8848938 - “Dog-Centric Activity Recognition by Integrating Appearance, Motion and Sound”
Tsuyohito ARAKI, Ryunosuke HAMADA, Kazunori OHNO and Keiji YANAI
ICCV Workshop on Egocentric Perception, Interaction and Computing (EPIC), (2019).
https://mm.cs.uec.ac.jp/pub/conf19/191102araki_0.pdf - “Cyber-enhanced canine suit with wide-view angle for three-dimensional LiDAR SLAM for indoor Environments”
Chayapol BEOKHAIMOOK, Kazunori OHNO, Thomas WESTFECHTEL, Hiroyuki NISHINOMA, Ryoichiro TAMURA and Satoshi TADOKORO
Advanced Robotics, 34, 11, (2020), 715-729.
DOI: https://doi.org/10.1080/01691864.2020.1772104 - “Rescue Dog Action Recognition by Integrating Ego-Centric Video, Sound and Sensor Information”
Yuta Ide, Tsuyohito Araki, Ryunosuke Hamada, Kazunori Ohno and Keiji Yanai
ICPR 2021: Pattern Recognition. ICPR International Workshops and Challenges, (2021), 321-333
https://link.springer.com/chapter/10.1007/978-3-030-68796-0_23#citeas