研究プロジェクト概要
本プロジェクトは、救助犬を遠隔から任意の場所に誘導する技術の確立を目的としている。災害救助犬は、ハンドラーの声や手振りによる指示を手がかりに捜索を行う。しかし、重機が稼働するような騒音の激しい環境や、ハンドラーから大きく離れた現場においては、音声や手振りによる指示がイヌに届きにくくなる場合がある。たとえば、雪山において数キロメートルにわたって捜索を行う山岳救助犬では、ハンドラーの声が届かない状況も発生しうる。そのような騒音下や遠隔地においても、救助犬を所望の捜索位置に誘導するための技術の確立が求められている。
従来より、音声や振動を用いてイヌを誘導する研究や取り組みが幾つか行われてきた。これらの手法では、音や振動によって「前進」「停止」「右回り」など、あらかじめ設定された動作をイヌに行わせることに成功している。しかし、依然として課題となっているのは、イヌを任意の方向へと柔軟に誘導する方法の開発である。
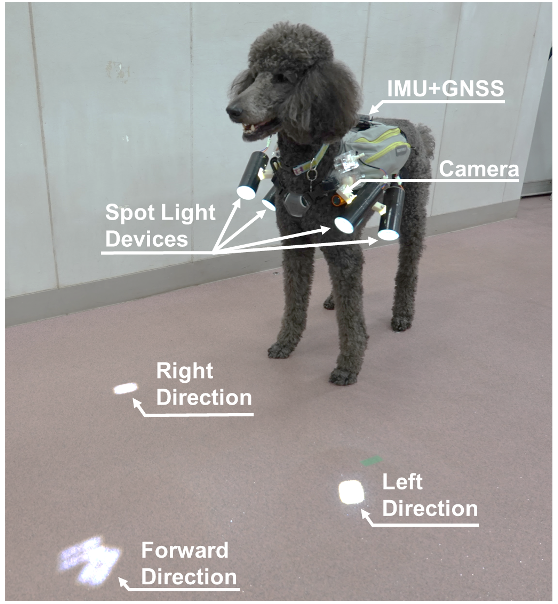
本研究ではこの課題を解決する手段として、救助犬が装着するスーツに搭載した光源を利用し、移動方向を視覚的に誘導する新たな手法を提案する[1][2]。提案手法では、イヌの前方の地面に対して、前・右・左の複数方向へスポット光を照射可能な光源をスーツに搭載し、ハンドラーがリモコン操作によって照射方向を切り替える。イヌは照射された光を追いかけることで、任意の方向に誘導される。さらに、地面に照射されたスポット光がイヌの動きと同期して移動することで、イヌは継続的にその光を追尾することができる。
動く明るい光を追う行動は、イヌに限らず、ネコ、鳥、魚、人間など、多くの動物に共通して見られる習性であり、本手法は多様な生物種に適用可能な誘導技術としての可能性も秘めている。
本手法に基づき、スポット光を追う訓練を受けた複数のイヌを用いて行動誘導の実証実験を実施し、イヌを任意の地点に誘導できることを確認した[1][2]。光刺激を利用した人間のナビゲーションなどの応用にも取り組んだ[3]。
関連リンク
発表論文
- “Control of Canine’s Moving Direction by Using On-suit Laser Beams”
Kazunori OHNO, Shumpei YAMAGUCHI, Hiroyuki NISHINOMA, Tatsuya HOSHI, Ryunosuke HAMADA, Satoko MATSUBARA, Miho NAGASAWA, Takefumi KIKUSUI, Satoshi TADOKORO
Proc. 2018 IEEE International Conference on Cyborg and Bionic Systems (CBS 2018), (2018). DOI: https://doi.org/10.1109/CBS.2018.8612258
Best Paper Award Third Prize - “Canine Motion Control using Bright Spotlight Devices Mounted on a Suit”
Hiroyuki NISHINOMA, Kazunori OHNO, Takefumi KIKUSUI, Miho NAGASAWA, Naoko TSUCHIHASHI, Shohei MATSUSHITA, Tomoha MIKAYAMA, Sakiko TOMORI, Maaya SAITO, Mikuru MURAYAMA, Satoshi TADOKORO
IEEE Transaction Transactions on Medical Robotics and Bionics, 1, 3, (2019), 189-198.
DOI: https://doi.org/10.1109/TMRB.2019.2930343 - “Autonomous Human Navigation Using Wearable Multiple Laser Projection Suit”
S. K. Nayak, K. Ohno, R. Bezerra, M. Konyo and S. Tadokoro
2022 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), (2022), 53-60
DOI: https://doi.org/10.1109/SSRR56537.2022.10018708