研究プロジェクト概要
本プロジェクトは、自然災害後の迅速な復旧を目指し、短時間で自由度の高いコンクリート構造物の造形を可能にする3Dコンクリートプリンタ(3DCP)の開発を目的とする。3DCPはモルタルを積層して構造物を造形する手法であり、建物や家具、橋梁などを自由に造形することができる。長時間の連続造形が可能であり、自動化による建設現場の省人化が実現できるなどの利点を有し、近年注目されている研究分野である。
従来のガントリー型やロボットアーム型の3DCPで大型構造物を積層する場合、造形物よりも大きな設備や広い敷地が必要となる。例えば、住宅用3DCP「Valcan」は4,724 mm × 14,173 mmという装置サイズを有する。大型の3DCPを現場に運搬・設置するためには大型車両が必要であり、造形場所に関する制約が大きい。自分より大きな構造物を造形する方法として、地上を走行する移動ロボット型の3DCPが存在するが、この方式でもロボットが走行できる広く平坦な敷地が必要となる。山間部や海岸沿い、災害後の被災地など、敷地面積が限られ交通インフラが寸断された現場では、これらの3DCPの導入が困難であった。
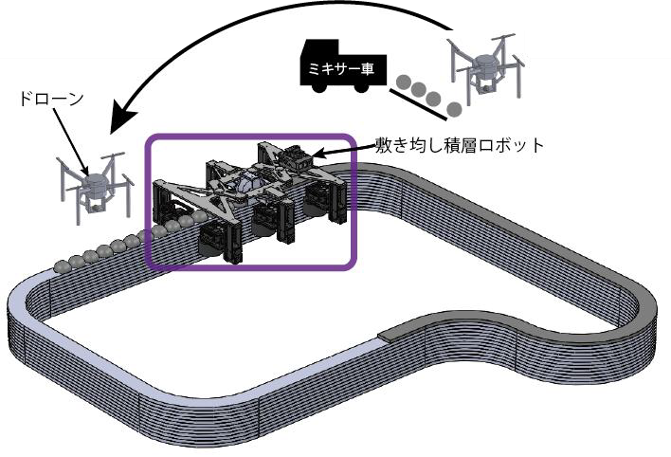
この課題を解決するために、本プロジェクトでは複数の異なるロボットを協調的に運用する群ロボット型3DCPを提案する。本システムでは、小分けにしたモルタルをドローンがで運搬し、積層場所に配置した後、自走式ロボットが敷き均しと積層を行う。このプロセスを繰り返すことで、大型構造物を造形する。ドローンによるモルタル運搬により、ミキサーを離れた場所や水源近くに設置でき、従来の3DCPで必要であった圧送用ポンプや配管を不要にすることが可能である。また、積層ノズルを駆動する大型アクチュエータを必要としないため、システム全体の小型化が期待できる。
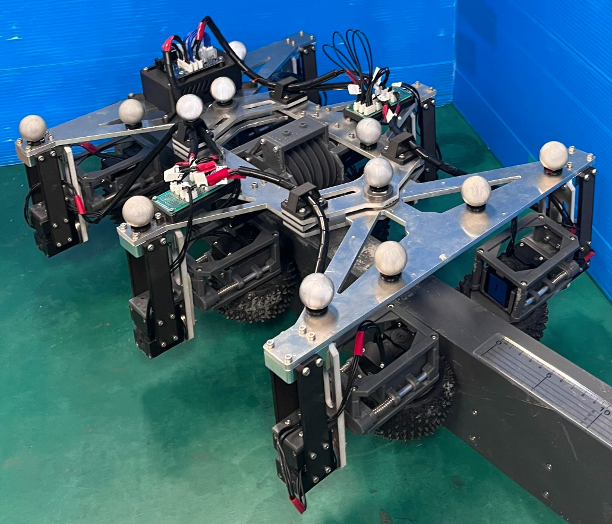
これまでの成果として、スクリュー方式の敷き均し積層機構を開発し、スクリューのフィンによる横方向の圧送と撹拌を同時に行うことで、モルタルの均一な積層が可能であることを確認した。さらに、積層したモルタル上を両側から挟むモノレールのような走行機構を備え、走行と同時にスクリューによる敷き均しを行う自走式ロボットを開発した。このロボットは水平移動と昇降の両方を可能にするタイヤ回転機構を搭載している。開発したスクリュー型敷き均し積層ロボットを用い、走行実験および積層実験を行い、提案手法の有効性を実証した。
関連リンク
発表論文
- “スクリュー型モルタル敷き均し積層機構の検討”
藤田 翔平、江川 諒、小島 匠太朗、岡田 佳都、田崎 悠斗、西脇 智哉、田所 諭、大野 和則
第25回計測自動制御学会システムインテグレーション部門講演会,1A1-04,(2024) - “造形物上を自走するスクリュー型モルタル敷き均し積層ロボットの開発”
藤田 翔平、江川 諒、奈良 貴明、小島 匠太郎、岡田 佳都、田崎 悠斗、西脇 智哉、田所 諭、大野 和則
ロボティクスメカトロニクス講演会2025, 1A1-A10, (2025)