研究プロジェクト概要
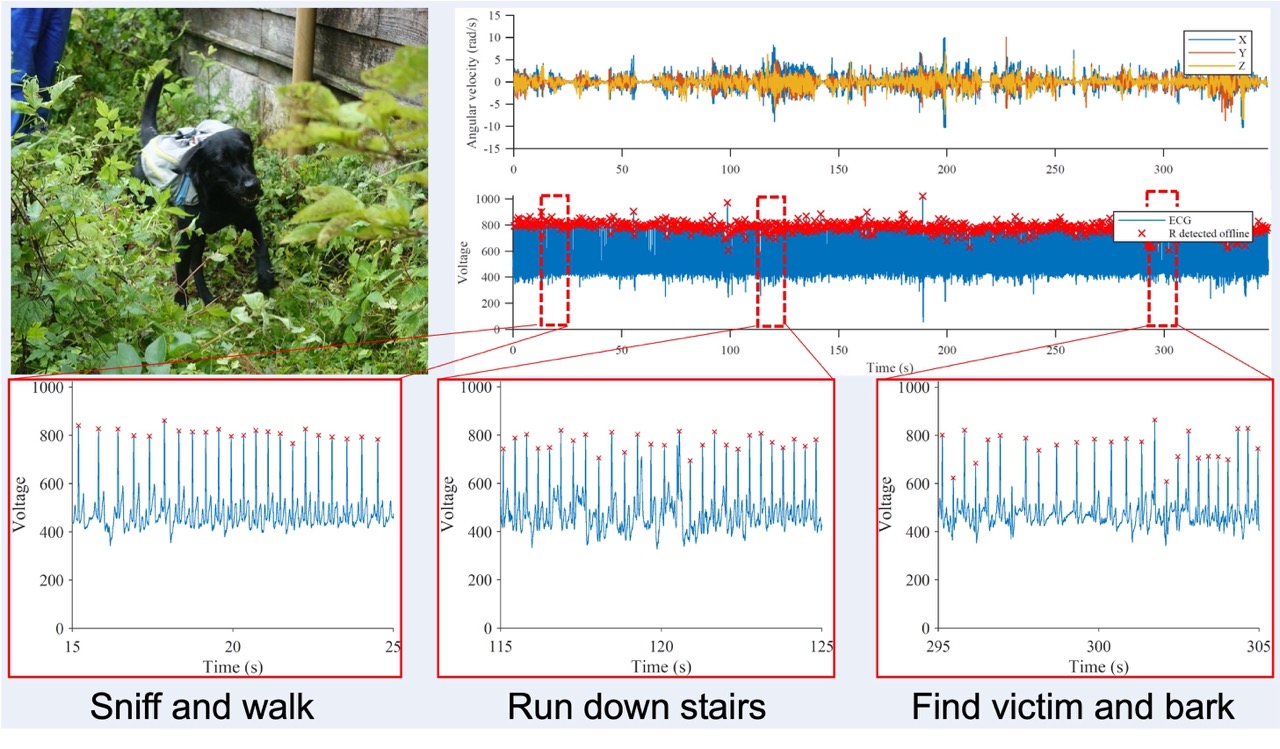
本プロジェクトは、捜索活動中の救助犬の「やる気」を推定する技術の確立を目的とする。災害現場などの過酷な環境においては、高温や疲労による救助犬の「やる気」の低下に配慮する必要がある。救助犬は、被災者の匂いを積極的に捜索している際には快情動を示し、被災者を発見できない状況では不快情動を示すとされている。イヌの快・不快情動は、「やる気」と密接に関係しており、本プロジェクトでは、救助犬の心電図(ECG)から得られる心拍変動を用いて「やる気」を推定する手法を提案する[1][2]。
活動中のイヌに対する心電図の計測には、安全性の観点から柔らかく使い捨て可能な電極を使用している。しかしながら、これらのソフト電極をM-X誘導の配置で装着した場合、激しい動作によって電極が脱落し、心拍測定が不安定になるという課題があった。また、救助犬の快・不快情動を推定するアルゴリズムを構築するために必要な心拍変動データの収集方法にも課題が存在していた。
本プロジェクトでは、激しい運動中でも電極を安定して装着できるよう、M-X誘導に対応したソフト電極を固定する専用インナーウェアと、情動推定アルゴリズムの学習に用いるデータの収集手法を提案した [3]。開発したインナーウェアにより、ソフト電極をM-X誘導で固定する作業時間を従来の3分の1以下に短縮し、97%以上の心拍を安定して測定できることを確認した。さらに、災害救助犬の快・不快情動を高信頼でラベル付けするためのデータ収集法を考案し、これにより学習した情動推定アルゴリズムを用いて、活動中の救助犬の情動を97.9%の精度で分類することに成功した。
提案手法を用いて、捜索訓練中の2頭の災害救助犬における情動の推移を可視化することにも成功した。活動中のイヌの心拍変動を計測し、情動を推定する技術は、イヌの状態を理解するうえで不可欠なものである[4]。本研究はその後のCREST「社会シグナルを介したイヌのスーパーセンシングの解明」における知覚行動および情動理解の研究にも繋がっている

関連リンク
発表論文
- “Real-time Emotional State Estimation System for Canines Based on Heart Rate Variability”
Ryunosuke HAMADA, Kazunori OHNO, Satoko MATSUBARA, Tatsuya HOSHI, Miho NAGASAWA, Takefumi KIKUSUI, Takatomi KUBO, Eri NAKAHARA, Kazushi IKEDA, Shumpei YAMAGUCHI, Toshitaka YAMAKAWA, Satoshi TADOKORO
2017 IEEE International Conference on Cyborg and Bionic Systems (CBS 2017), (2017), 298-303,
DOI: https://doi.org/10.1109/CBS.2017.8266120 - “Cyber-Enhanced Rescue Canine”
Kazunori Ohno, Ryunosuke Hamada, Tatsuya Hoshi, Hiroyuki Nishinoma, Shumpei Yamaguchi, Solvi Arnold, Kimitoshi Yamazaki, Takafumi Kikusui, Satoko Matsubara, Mihi Nagasawa, Takatomi Kubo, Eri Nakahara, Yuki Maruno, Kazushi Ikeda, Toshitaka Yamakawa, Takeshi Tokuyama, Ayumi Shinohara, Ryo Yoshinaka, Diptarama Hendrian, Kaizaburo Chubachi, Satoshi Kobayashi, Katsuhito Nakashima, Hiroaki Naganuma, Ryu Wakimoto, Shu Ishikawa, Tatsuki Miura and Satoshi Tadokoro In Ed. Satoshi Tadokoro, Disaster Robotics – Results from the ImPACT Tough Robotics Challenge
Springer Tracts in Advanced Robotics 128, (2019), 143-193
DOI: https://doi.org/10.1007/978-3-030-05321-5_4 - “Electrocardiogram Measurement and Emotion Estimation of Working Dogs”
Kazunori Ohno, Kotaro SATOU, Ryunosuke HAMADA, Takatomi KUBO, Kazushi IKEDA, Miho NAGASAWA, Takefumi KIKUSUI, Sandeep Kumar NAYAK, Shotaro KOJIMA, Satoshi TADOKORO
IEEE Robotics and Automation Letters, 7, 2, (2022), 4047-4054
DOI: https://doi.org/10.1109/LRA.2022.3145590 - “Emotional studies in dogs and cats and their estimation techniques: an engineering perspective”
Hikari Koyasu, Nanako Miyai, Takatomi Kubo, Saho Takagi, Yurina Wada, Yuki Maruno, Miho Nagasawa, Kazunori Ohno
Advanced Robotics 38(14), (2024), 908–925
DOI: https://doi.org/10.1080/01691864.2024.2358439