-
使役犬のやる気(快・不快情動)推定
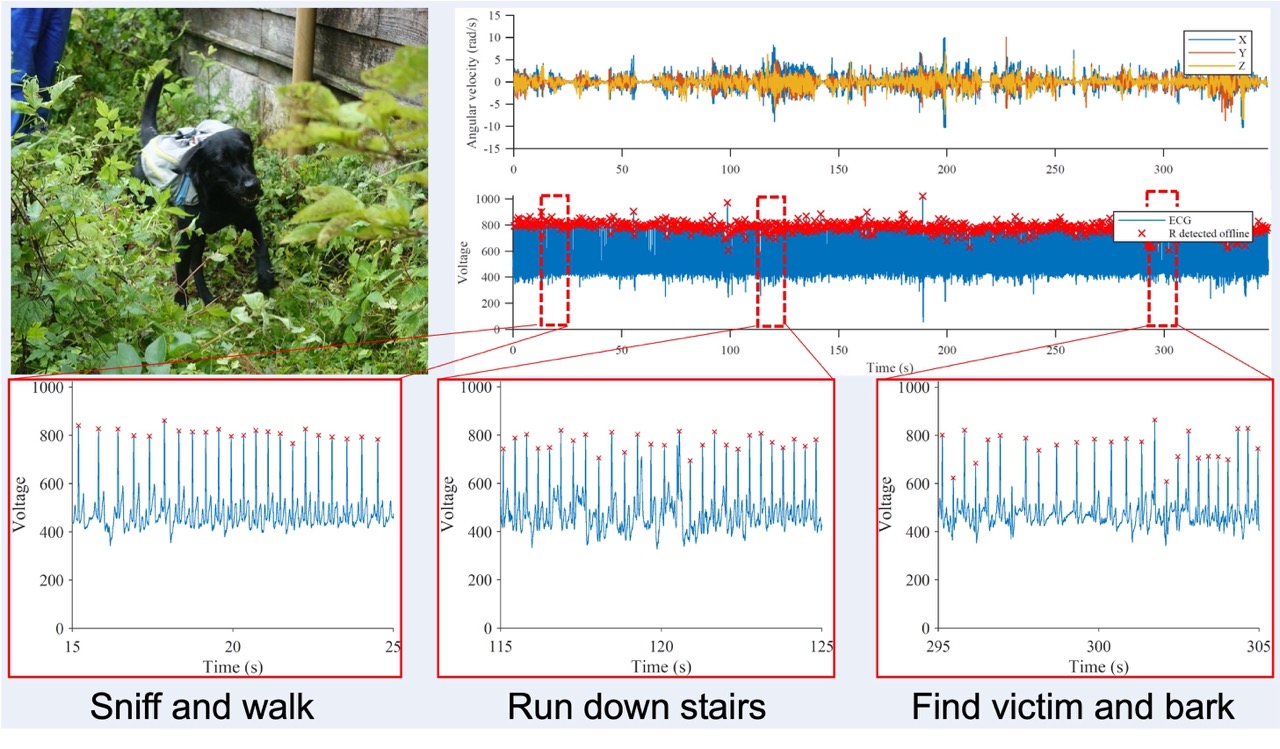
研究プロジェクト概要 本プロジェクトは、捜索活動中の救助犬の「やる気」を推定する技術の確立を目的とする。災害現場などの過酷な環境においては、高温や疲労による救助犬の「やる気」の低下に配慮する必要がある。救助犬は、被災者の匂いを積極的に捜索している際には快情動を示し、被災者を発見できない状況では不快情動を示すとされている。イヌの快・不快情動は、「やる気」と密接に関係しており、本プロジェクトでは、救助犬の心電図(ECG)から得られる心拍変動を用いて「やる気」を推定する手法を提案する[1][2]。 活動中のイヌに対する心電図の計測には、安全性の観点から柔らかく使い捨て可能な電極を使用している。しかしながら、これらのソフト電極をM-X誘導の配置で装着した場合、激しい動作によって電極が脱落し、心拍測定が不安定になるという課題があった。また、救助犬の快・不快情動を推定するアルゴリズムを構築するために必要な心拍変動データの収集方法にも課題が存在していた。 本プロジェクトでは、激しい運動中でも電極を安定して装着できるよう、M-X誘導に対応したソフト電極を固定する専用インナーウェアと、情動推定アルゴリズムの学習に用いるデータの収集手法を提案した [3]。開発したインナーウェアにより、ソフト電極をM-X誘導で固定する作業時間を従来の3分の1以下に短縮し、97%以上の心拍を安定して測定できることを確認した。さらに、災害救助犬の快・不快情動を高信頼でラベル付けするためのデータ収集法を考案し、これにより学習した情動推定アルゴリズムを用いて、活動中の救助犬の情動を97.9%の精度で分類することに成功した。 提案手法を用いて、捜索訓練中の2頭の災害救助犬における情動の推移を可視化することにも成功した。活動中のイヌの心拍変動を計測し、情動を推定する技術は、イヌの状態を理解するうえで不可欠なものである[4]。本研究はその後のCREST「社会シグナルを介したイヌのスーパーセンシングの解明」における知覚行動および情動理解の研究にも繋がっている 関連リンク 発表論文
-
トランスフォーマブルプロダクションを用いたマルチロボットシステム
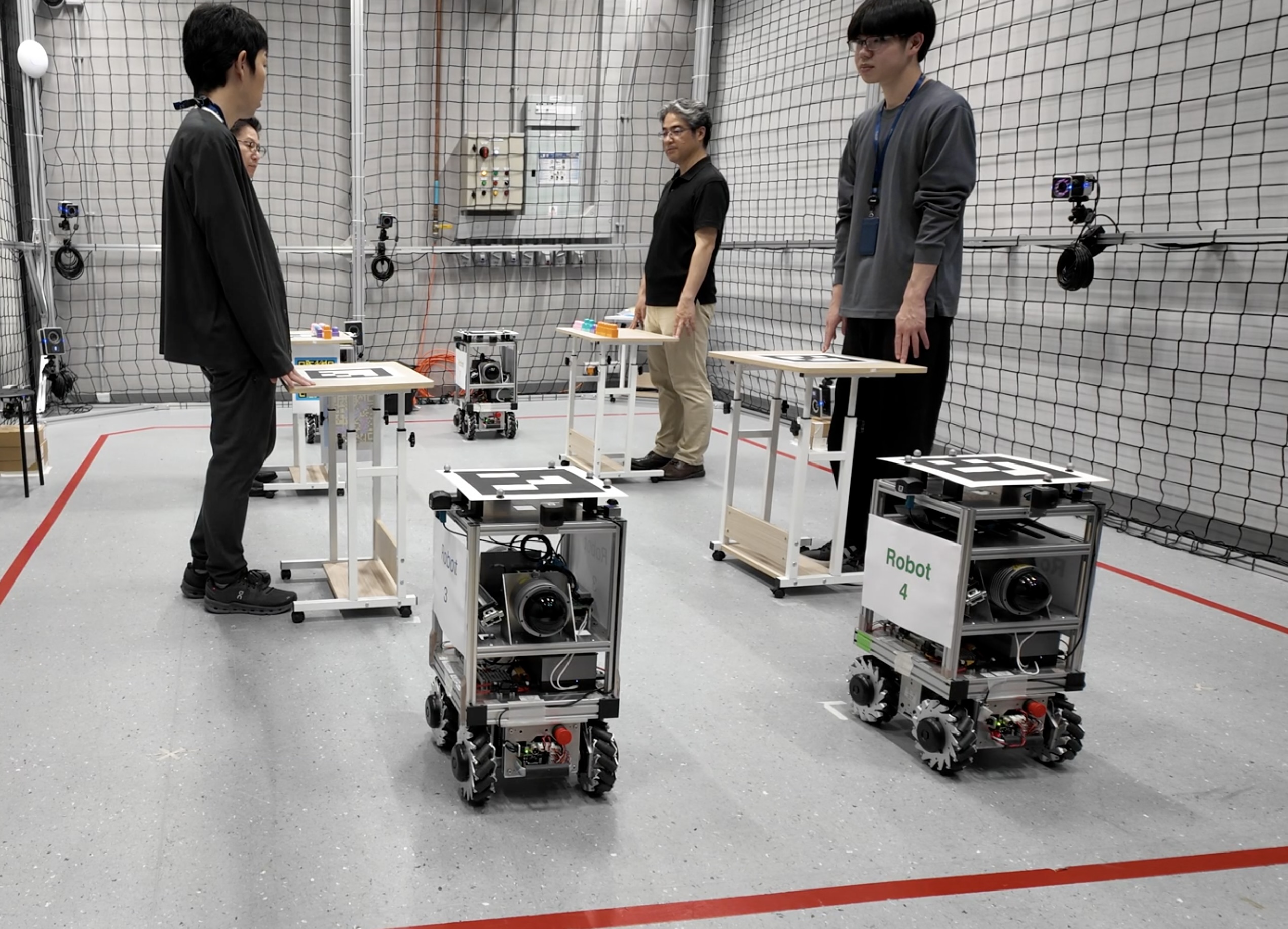
研究プロジェクト概要 本研究プロジェクトでは、従来の大量生産から、異種マルチロボットシステムによって実現される変形可能な生産パラダイムへの移行を探求します。目的は、特に衣類のマスカスタマイゼーションにおいて、スマートファクトリーの柔軟性、効率性、およびスケーラビリティを向上させることにあります。主な要素には、リアルタイムなレイアウト理解、協調的なマルチエージェント物流、そしてインテリジェントなタスク割り当て・スケジューリングが含まれます。本プロジェクトでは、深層強化学習とSLAMベースの空間認識を統合することで、生産資源とワークフローを動的に管理します。本研究は、自律型製造システムの発展に貢献し、オンデマンドかつ適応可能な産業運用への道を切り開くものです。 関連リンク 発表論文
-
ロボット技術を利用した革新的な3Dコンクリートプリンター
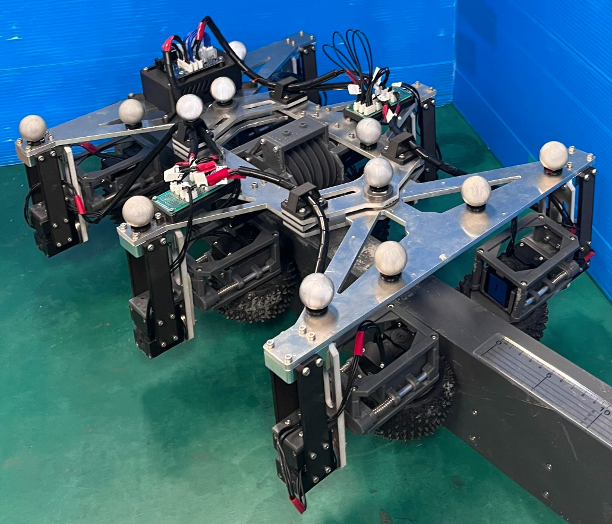
研究プロジェクト概要 本プロジェクトは、自然災害後の迅速な復旧を目指し、短時間で自由度の高いコンクリート構造物の造形を可能にする3Dコンクリートプリンタ(3DCP)の開発を目的とする。3DCPはモルタルを積層して構造物を造形する手法であり、建物や家具、橋梁などを自由に造形することができる。長時間の連続造形が可能であり、自動化による建設現場の省人化が実現できるなどの利点を有し、近年注目されている研究分野である。 従来のガントリー型やロボットアーム型の3DCPで大型構造物を積層する場合、造形物よりも大きな設備や広い敷地が必要となる。例えば、住宅用3DCP「Valcan」は4,724 mm × 14,173 mmという装置サイズを有する。大型の3DCPを現場に運搬・設置するためには大型車両が必要であり、造形場所に関する制約が大きい。自分より大きな構造物を造形する方法として、地上を走行する移動ロボット型の3DCPが存在するが、この方式でもロボットが走行できる広く平坦な敷地が必要となる。山間部や海岸沿い、災害後の被災地など、敷地面積が限られ交通インフラが寸断された現場では、これらの3DCPの導入が困難であった。 この課題を解決するために、本プロジェクトでは複数の異なるロボットを協調的に運用する群ロボット型3DCPを提案する。本システムでは、小分けにしたモルタルをドローンがで運搬し、積層場所に配置した後、自走式ロボットが敷き均しと積層を行う。このプロセスを繰り返すことで、大型構造物を造形する。ドローンによるモルタル運搬により、ミキサーを離れた場所や水源近くに設置でき、従来の3DCPで必要であった圧送用ポンプや配管を不要にすることが可能である。また、積層ノズルを駆動する大型アクチュエータを必要としないため、システム全体の小型化が期待できる。 これまでの成果として、スクリュー方式の敷き均し積層機構を開発し、スクリューのフィンによる横方向の圧送と撹拌を同時に行うことで、モルタルの均一な積層が可能であることを確認した。さらに、積層したモルタル上を両側から挟むモノレールのような走行機構を備え、走行と同時にスクリューによる敷き均しを行う自走式ロボットを開発した。このロボットは水平移動と昇降の両方を可能にするタイヤ回転機構を搭載している。開発したスクリュー型敷き均し積層ロボットを用い、走行実験および積層実験を行い、提案手法の有効性を実証した。 関連リンク 発表論文
-

インフラ点検のための球殻ドローン
研究プロジェクト概要 受動回転球殻ドローンは、橋梁などのインフラの狭隘部を探査するために開発されたドローンです。ジンバルを介して取り付けられた球状のプロペラガード(球殻)はドローン本体を衝突から保護するだけでなく、受動的に回転して衝撃を受け流します。球殻をタイヤのように使って、点検対象面を転がりながら飛行することも可能です。このような点検に適した性能が認められ、国交省のNETISデータベースにも橋梁目視点検機器として掲載されています。 関連リンク 研究業績
-

軍艦島の老朽化コンクリート建物の劣化調査
研究プロジェクト概要 本プロジェクトは、世界遺産の一部である軍艦島(長崎県長崎市端島)[a]における老朽化建物の劣化調査を目的としている。一般社団法人建築研究振興協会[b]は、2023年に劣化調査を実施したが、これは2015年以来8年ぶりとなる軍艦島全建物を対象とした調査であった。しかし、老朽化が著しいいくつかの建物は内部に人が立ち入って調査を行うことができない。特に30号棟は、日本初のRC造コンクリート建築であり、建設から100年以上が経過している。老朽化が進み、壁や床の崩落が激しいため、人の立ち入りが禁止されている。 本プロジェクトでは、アームを備えたクローラロボットを用い、人の立ち入りが禁止されている30号棟内部の劣化調査を行うことを提案した。調査では、アーム先端付近に設置した360度カメラを用いて建物の天井、壁、柱、梁を撮影し、点検員が映像を確認して目視点検を実施した。カメラ映像を活用した遠隔操縦により内部調査を進め、アームを活用して床に散乱していた木材や生活用品などの障害物を脇に寄せ、移動しやすい経路を確保した。また、要所でアームを高く上げて360度カメラで劣化状況を撮影した。非常時の補修用テザーおよび有線通信のLANケーブルを引きながら、建物内部の死角エリアを調査した。 2023年および2024年には、クローラロボットを用いた内部点検を実施し、2階、3階、5階の廊下部分の損傷状況を明らかにした。また、3階調査時には中庭から1階の柱を撮影し、一部の柱の劣化状況も確認した。これらの成果はROBOMECH2024および2025で報告され、高く評価されて1件の機械学会の受賞につながった[c]。さらに、2025年度日本建築学会大会(9月開催)[d]において、2023年以降に人とロボットで実施した劣化調査の全体成果が報告される予定である。 関連リンク 発表論文
-
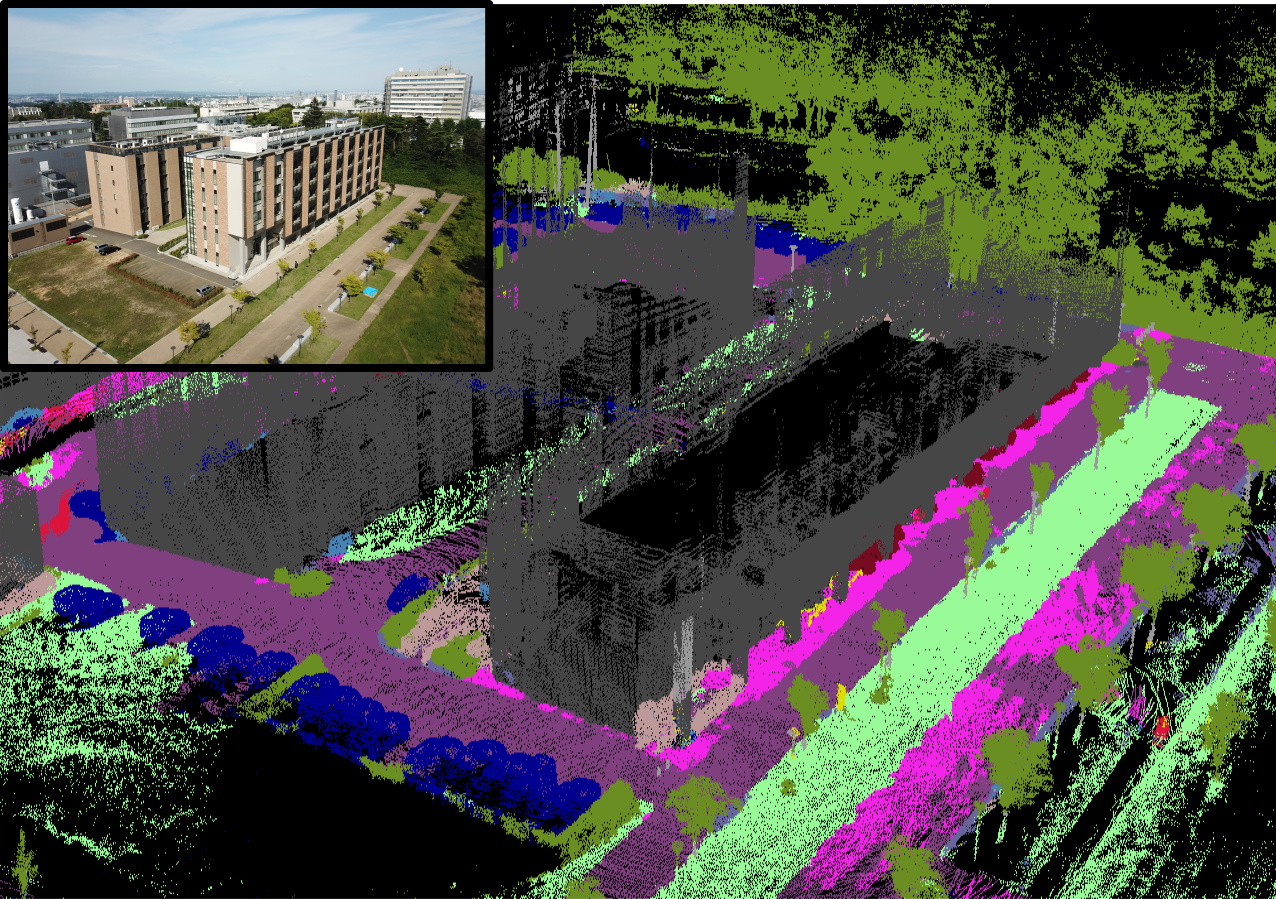
Fusion of Camera and Lidar Data for Large Scale Semantic Mapping
Current self-driving vehicles rely on detailed maps of the environment, that contains exhaustive semantic information. This…